Home > finite state machines > FSM Applications > Lift Controller
A Lift Controller
Assumptions :
- Lift service is between two floors only.
- Lift doors closed /opened automatically.
- Lift fan switch on/off automatically (used only when lift is in use).
- If lift doors remain open due to malfunctioning of door etc. lift will not start.
- The direction of motion of motor changed automatically according to position of lift.
- No lift calling system.
Lift controller operation :
- If the lift is downstairs,
- Close the doors
- Start the lift fan and check for closed door.
- Select the motor direction to upward
- Start motor and go up.
- Check for top floor position
- Switch off lift fan and motor
- Open the doors
- If the lift is upstairs,
- Close the doors
- Start the lift fan and check for closed door.
- Select the motor direction to downward
- Start motor and go down.
- Check for ground floor position
- Switch off lift fan and motor
- Open the doors
-
Table below shows the input and output signals opeartion.
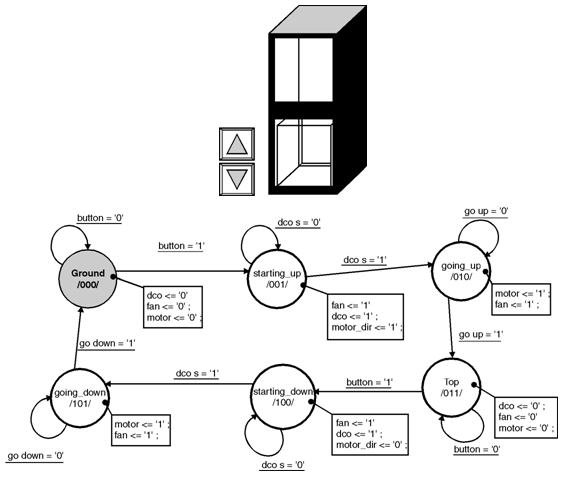
State diagram :
VHDL code for lift controller :library IEEE; use IEEE.std_logic_1164.all; use IEEE.std_logic_arith.all; use IEEE.std_logic_unsigned.all; entity lift_ctr is port ( button: in STD_LOGIC; clk: in STD_LOGIC; dco_s: in STD_LOGIC; go_down: in STD_LOGIC; go_up: in STD_LOGIC; dco: out STD_LOGIC; fan: out STD_LOGIC; motor: out STD_LOGIC; motor_dir: out STD_LOGIC); end lift_ctr; architecture lift_ctr_arch of lift_ctr is attribute enum_encoding: string; type State_type is (Ground, starting_up, going_up, Top, starting_down, going_down ); attribute enum_encoding of State_type: type is "000 " & -- Ground "001 " & -- starting_up "010 " & -- going_up "011 " & -- Top "100 " & -- starting_down "101" ; -- going_down signal State: State_type; begin State_machine: process (clk) begin if clk'event and clk = '1' thbbben case State is when Ground => dco <= '0'; fan <= '0'; motor <= '0'; if button = '1' then State <= starting_up; elsif button = '0' then State <= Ground; end if; when starting_up => fan <= '1'; dco <= '1'; motor_dir <= '1'; if dco_s = '1' then State <= going_up; elsif dco_s = '0' then State <= starting_up; end if; when going_up => motor <= '1'; fan <= '1'; if go_up = '1' then State <= Top; elsif go_up = '0' then State <= going_up; end if; when Top => dco <= '0'; fan <= '0'; motor <= '0'; if button = '1' then State <= starting_down; elsif button = '0' then State <= Top; end if; when starting_down => fan <= '1'; dco <= '1'; motor_dir <= '0'; if dco_s = '1' then State <= going_down; elsif dco_s = '0' then State <= starting_down; end if; when going_down => motor <= '1'; fan <= '1'; if go_down = '1' then State <= Ground; elsif go_down = '0' then State <= going_down; end if; when others => null; end case; end if; end process; end lift_ctr_arch;