Brushless DC motors (BLDC) are more reliable than standard DC (mechanically commutated) motors. BLDC motors are more suitable for control and regulation. It can be achieved in two different ways:
• Sensored mode which uses the Hall sensors or
• Sensorless mode (do not use Hall sensors)
The sensored control drawbacks are:
• cost of Hall effect sensors, wirings and connector
• potential failure of the sensors
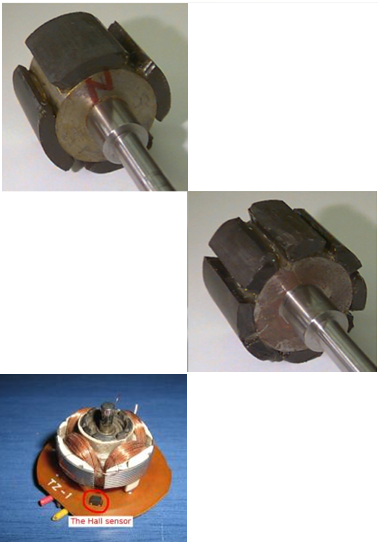
Figure below shows the BLDC motors.
CONSTRUCTION AND OPERATING PRINCIPLE
BLDC motors are a type of synchronous motor. This means the magnetic field generated by the stator and the magnetic field generated by the rotor rotates at the same frequency. BLDC motors do not experience the “slip†that is normally seen in induction motors.
• BLDC motors come in single-phase, 2-phase and 3-phase configurations. Corresponding to its type, the stator has the same number of windings. Out of these, 3-phase motors are the most popular and widely used.
• Stator:The stator of a BLDC motor consists of stacked steel laminations with windings placed in the slots that are axially cut along the inner periphery. Traditionally, the stator resembles that of an induction motor; however, the windings are distributed in a different manner.
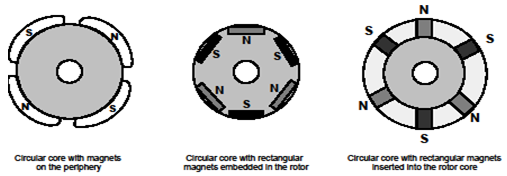
• Most BLDC motors have three stator windings connected in star fashion. Each of these windings is constructed with numerous coils interconnected to form a winding. Figure below shows Working of BLDC motors.
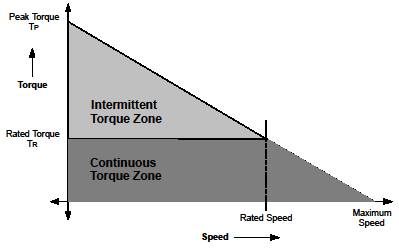
TORQUE/SPEED CHARACTERISTICS
Figure below shows an example of torque/speed characteristics. There are two torque parameters used to define a BLDC motor, peak torque (TP) and rated torque (TR). During continuous operations, the motor can be loaded upto the rated torque. In a BLDC motor, the torque remains constant for a speed range up to the rated speed. The motor can be run up to the maximum speed, which can be up to 150% of the rated speed, but the torque starts dropping.